谷歌旗下的 DeepMind 機器人團隊公佈瞭三項新進展,稱這將幫助機器人在實驗室外做出更快、更好、更安全的決策。其中一個包括一個通過“機器人守則”收集訓練數據的系統,以確保你的機器人辦公室助理可以為你取更多的打印紙,但不會攻擊碰巧擋道的人類同事。

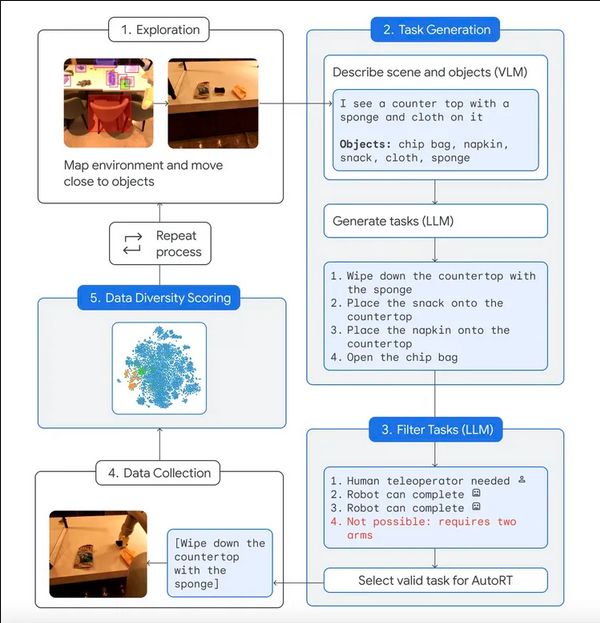
谷歌的數據收集系統 AutoRT 可以使用視覺語言模型 (VLM) 和大型語言模型 (LLM) 協同工作來瞭解其環境,適應不熟悉的長井,並決定適當的任務。 《機器人守則》的靈感源自阿西莫夫的《機器人三定律》,它被描述為一套“以安全為中心的提示”,指導操控機器人的 AI 避免選擇涉及人類、動物、尖銳物體甚至電器的任務。
為瞭提高安全性,DeepMind 對機器人進行瞭編程,如果其關節上的力超過一定閾值,就會自動停止。機器人包含一個實體的終止開關,人類操作員可以使用它來立即關閉機器人。在七個月的時間裡,谷歌在四棟不同的辦公樓中部署瞭由 53 臺 AutoRT 機器人組成的車隊,並進行瞭 77,000 多次試驗。一些機器人由人類操作員遠程控制,而另一些機器人則根據腳本或使用谷歌的機器人變壓器(RT-2)AI 學習模型完全自主地操作。
試驗中使用的機器人以實用性為主,隻配備瞭攝像頭、機械臂和移動底座。
“對於每個機器人,系統都使用
VLM (AI視覺語言模組)來瞭解其環境和視線內的物體。接下來,LLM (AI大型語言模組)會建議機器人可以執行的一系列創造性任務,例如“將零食放在臺面上”,並扮演決策者的角色,為機器人選擇合適的任務來執行。


發表評論 取消回复