IT之傢 10 月 31 日消息,自動駕駛公司 Waymo 長期以來一直將與谷歌 DeepMind 的聯系及其數十年的 AI 研究視為其在自動駕駛領域超越競爭對手的戰略優勢。現在這傢 Alphabet 旗下的公司更進一步,為其機器人出租車開發一種基於谷歌多模態大語言模型(MLLM)“Gemini”的新訓練模型。

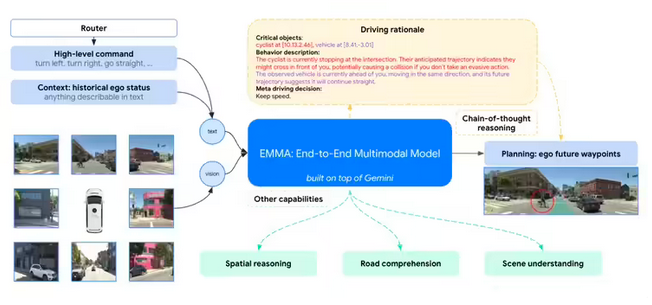
Waymo 今天發佈瞭一篇新的研究論文,介紹瞭一種名為“端到端多模態自動駕駛模型”(EMMA)的新模型。這種新的端到端訓練模型能夠處理傳感器數據,生成“自動駕駛車輛的未來軌跡”,幫助 Waymo 的無人駕駛車輛做出關於去哪裡以及如何避開障礙物的決策。
但更重要的是,這是首次有跡象表明,自動駕駛領域的領導者計劃將 MLLM 應用於其業務。這意味著 MLLM 可能不僅僅局限於聊天機器人、電子郵件組織者和圖像生成器等領域,而是可以擴展到自動駕駛領域。
在研究中 Waymo 提出,傳統的自動駕駛系統通常會為感知、映射、預測和規劃等各種功能開發特定的“模塊”。雖然這種方法在過去多年中效果顯著,但也存在可擴展性問題,主要是由於模塊間的誤差積累和通信有限。此外,這些模塊由於是“預定義”的,因此面對“新環境”時適應能力較差。
Waymo 認為,像 Gemini 這樣的 MLLM 可以解決這些問題。首先,這些模型是經過大量互聯網數據訓練的“通才”,能提供超出常規駕駛記錄的豐富“世界知識”;其次,它們通過“鏈式推理”等技術展現出“卓越”的推理能力,能夠將復雜任務分解為一系列邏輯步驟,模仿人類的思維方式。
Waymo 表示,EMMA 模型在幫助機器人出租車應對復雜環境方面表現良好。例如,當遇到各種動物或道路施工時,EMMA 能夠幫助無人駕駛汽車找到合適的行駛路線。
據悉,特斯拉等其他公司也在大力開發其自動駕駛汽車的端到端模型。特斯拉首席執行官埃隆・馬斯克聲稱,最新版本的 FSD 12.5.5 采用瞭“端到端神經網絡”人工智能系統,將攝像頭圖像轉換為駕駛決策。
這表明,在部署真正的無人駕駛車輛方面領先於特斯拉的 Waymo 也對追求端到端系統感興趣。該公司表示,其 EMMA 模型在軌跡預測、物體檢測和道路圖理解方面表現出色。
但 EMMA 也有其局限性,Waymo 承認,在將該模型投入實踐之前,還需要進行未來的研究。例如,EMMA 無法整合來自激光雷達或雷達的 3D 傳感器輸入,Waymo 表示這是因為“計算開銷太高”,並且一次隻能處理少量圖像幀。
研究論文中未提及的另一個風險是,像 Gemini 這樣的 MLLM 會存在“幻覺”,而無人駕駛汽車的容錯率非常有限。因此,在這些模型能夠大規模部署之前,還需要進行更多研究。


發表評論 取消回复